
Descripción
Características del Sensor QTR-1A:
- Tecnología de Infrarrojos (IR):
- El QTR-1A utiliza un emisor de luz infrarroja (LED IR) y un fototransistor para detectar la cantidad de luz infrarroja reflejada hacia el sensor. La cantidad de luz reflejada varía dependiendo de la superficie que está frente al sensor (oscura o clara).
- Salida Analógica:
- El QTR-1A ofrece una salida analógica que varía dependiendo de la cantidad de luz reflejada. Los sensores proporcionan un valor de voltaje que puede ser leído a través de un pin analógico en microcontroladores como Arduino o Raspberry Pi.
- Si el sensor está sobre una superficie oscura (por ejemplo, una línea negra), el valor de salida será bajo debido a que menos luz se refleja. Si está sobre una superficie clara (como un fondo blanco), el valor de salida será alto porque la superficie refleja más luz.
- Uso en Seguidores de Línea:
- El QTR-1A es muy popular en robots seguidores de línea, donde su capacidad para detectar una línea en el suelo permite al robot seguir un camino trazado. Este sensor es particularmente útil cuando se desea un solo sensor para detectar una línea en lugar de un arreglo de múltiples sensores.
- Rango de Detección:
- El rango de detección de este sensor varía, pero generalmente está en el rango de 0 a 10 cm, dependiendo del contraste entre la línea y el fondo.
- Sensibilidad:
- El QTR-1A tiene una buena sensibilidad a la cantidad de luz reflejada y es capaz de detectar pequeñas variaciones en el contraste de las superficies. Sin embargo, su rendimiento dependerá de la superficie y la cantidad de luz ambiental.
- Consumo de Energía:
- Este sensor tiene un bajo consumo de energía, lo que lo hace adecuado para su uso en robots autónomos alimentados por baterías.
Especificaciones Técnicas del QTR-1A:
- Número de Sensores: 1 sensor reflectivo.
- Tipo de Salida: Salida analógica (variable según la reflexión de luz).
- Voltaje de Operación: 5V.
- Corriente de Operación: Aprox. 10-20 mA.
- Rango de Detección: Aproximadamente 0 a 10 cm.
- Tamaño: Compacto, adecuado para proyectos pequeños y robots educativos.
- Tipo de Superficie Detectada: Superficies con alto contraste, como negro sobre blanco o blanco sobre negro.
Aplicaciones Comunes del QTR-1A:
- Robots Seguidores de Línea:
- Los robots que siguen una línea, como en competiciones de robótica, a menudo utilizan el QTR-1A para detectar si están sobre la línea o fuera de ella. Los robots pueden tomar decisiones de navegación basadas en el valor de salida del sensor.
- Sensores de Proximidad:
- El QTR-1A puede utilizarse como un sensor de proximidad, para detectar objetos cercanos. Al detectar variaciones en el reflejo de luz, el sensor puede determinar la proximidad de una superficie o de un objeto.
- Sistemas de Control de Trayectorias:
- Puede emplearse en sistemas de control de trayectorias, donde el sensor ayuda a un robot a ajustar su posición en función de la detección de una línea o patrón en el suelo.
- Detección de Superficies Claras y Oscuras:
- En sistemas que necesitan distinguir entre superficies claras y oscuras (por ejemplo, en aplicaciones de clasificación o detección de patrones), el QTR-1A proporciona una salida analógica para realizar estas distinciones.
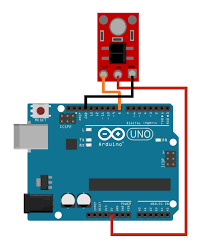
Conexión y Código Básico (Ejemplo con Arduino):
A continuación se muestra cómo conectar y usar el QTR-1A con un Arduino para leer la señal analógica y realizar alguna acción basada en la detección de una línea.




Valoraciones
No hay valoraciones aún.